 |
アマゾンでDCモータードライバを探していたら写真のような製品を見つけました。 2チャンネルのDCモータードライバー(L298N)が2個とギヤーモーターとタイヤが4個づつセットになった製品です。 価格は1780円です。 他店では2倍くらいの値段で売られています。 DCモータードライバーだけが欲しかったのですが安かったのでバランスロボットでも作ろうと思って購入しました。 |
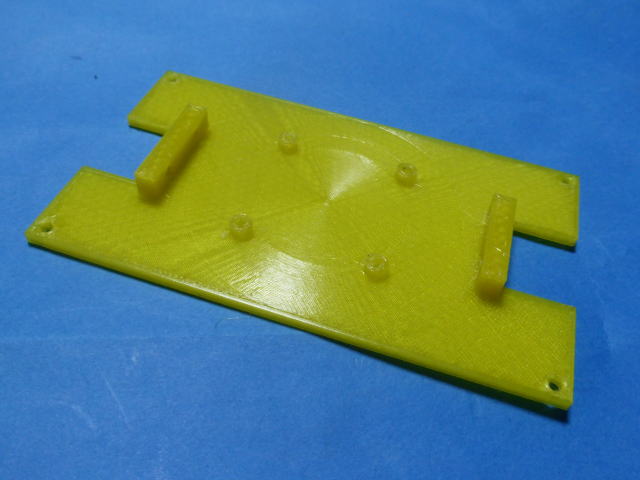 |
まず最初にモーターを取り付ける板を作りました。 |
 |
モーターとドライバーを取り付けました。 4角に穴があけてあります。 長ネジを柱として2階と3階を追加する予定です。 2階の板・・・バッテリーを載せる予定です。 3階の板・・・CPUとジャイロセンサーを載せる予定です。 3Dプリンターで印刷したので切断も穴あけも不要です。 材料もフィラメントさえあればどんな形でもできます。 もの作りを趣味とする人間にとって3Dプリンターは本当に重宝します。 |
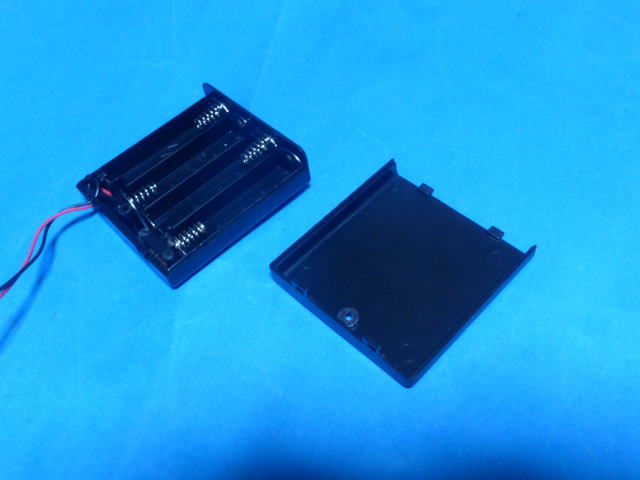 |
バッテリーボックスです。 単3乾電池が4個入ります。 |
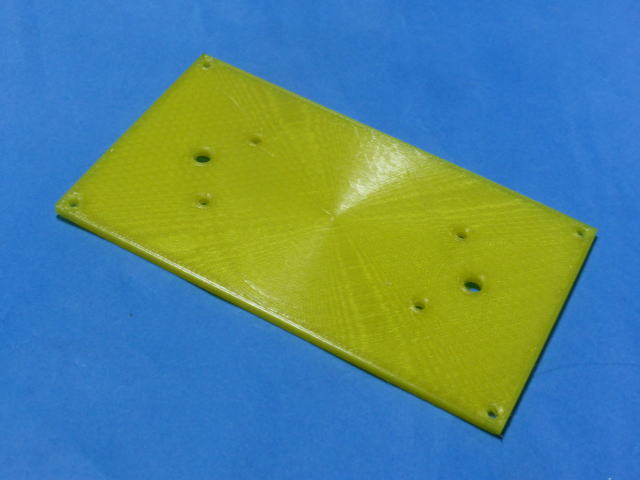 |
バッテリーを固定するための板を印刷しました。 |
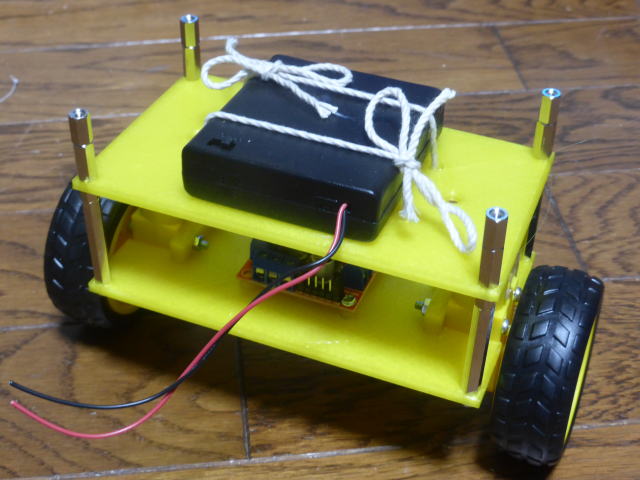 |
本体に取り付けました。 |
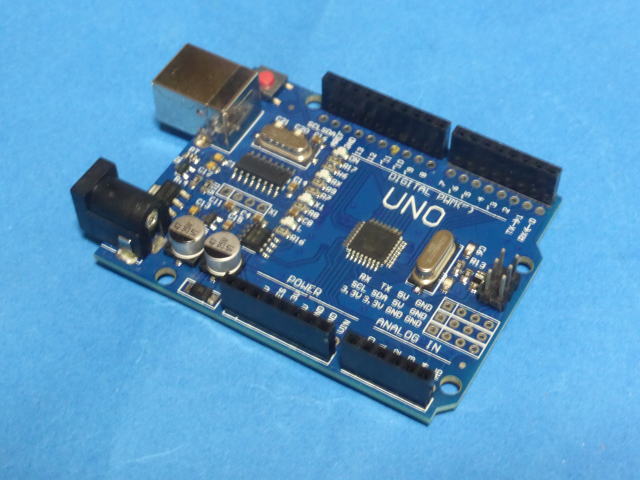 |
制御基板のArduino UNOです。 |
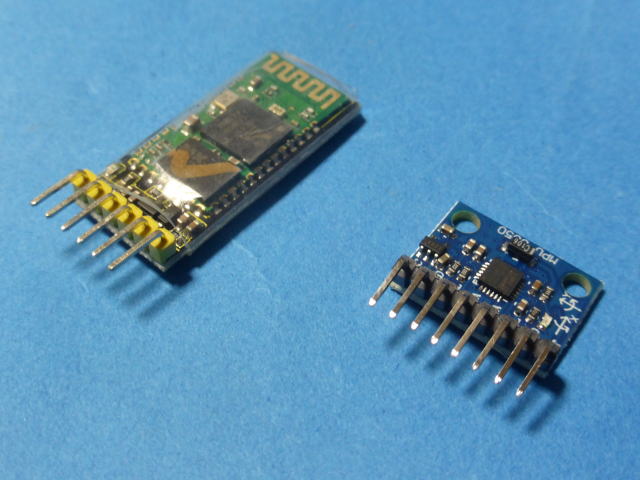 |
ジャイロモジュールとブルートゥースモジュールです。 右・・・ジャイロモジュールMPU6050 (378円) 左・・・ブルートゥースモジュール HC-05 (699円) ブルートゥースモジュールはスマホからリモートコントロールするのに使います。 |
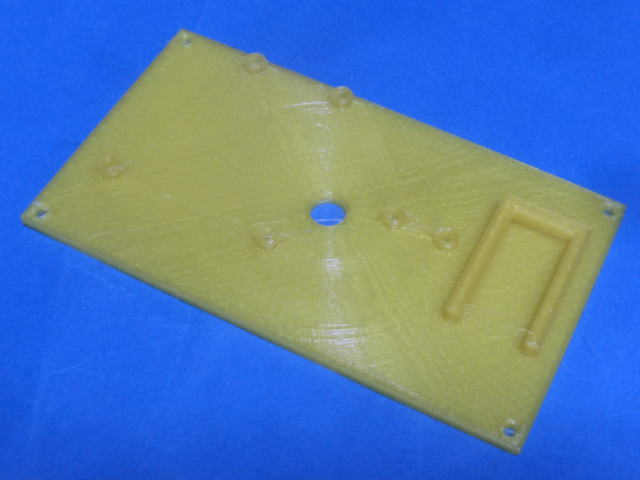 |
制御基板を固定するための板を印刷しました。 |
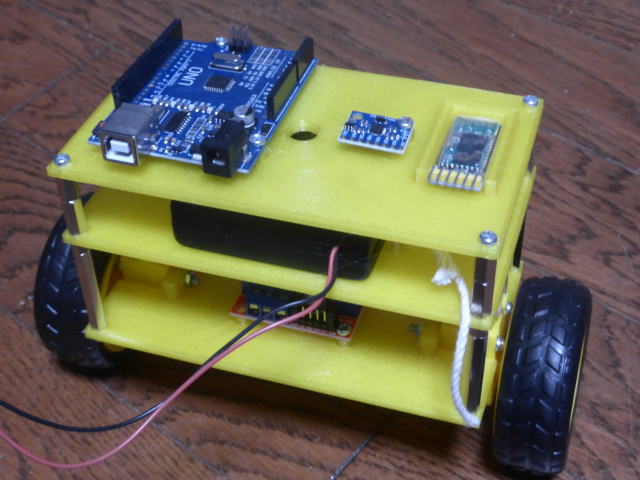 |
本体に取り付けました。 これで機構的には完成です。 後は配線とソフトです。 |
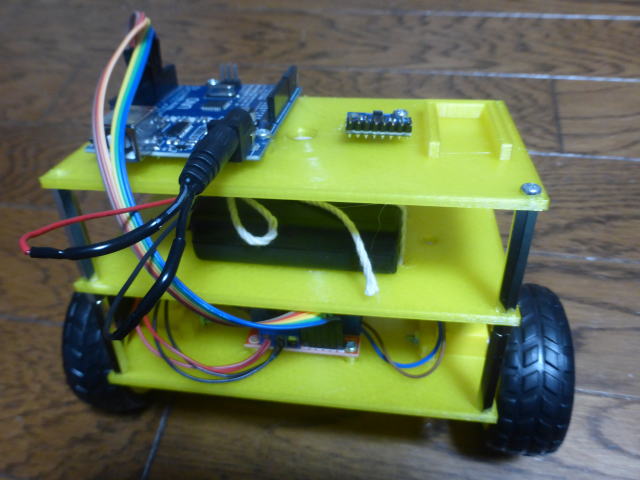 |
ジャイロを除く配線が完了しました。 |
| モーター回転のテストです。 正常に回転しました。 |
|
| ソフトを書きこんで動作テストを実施しました。 不安定ながらなんとか動きました。 1.6Vのバッテリーでは電圧が不足していたので外部電源から10Vを供給しました。 2.本体を垂直にした時にモーターが回転しました。バランスをとる角度がずれていたのでジャイロ基板を傾けて本体が垂直でバランスをとるようにしました。 3.安定性を高めるためスペーサーを追加して全高を高くしました。 4.PIDの各数値が未調整なので振動が生じています。 |
|
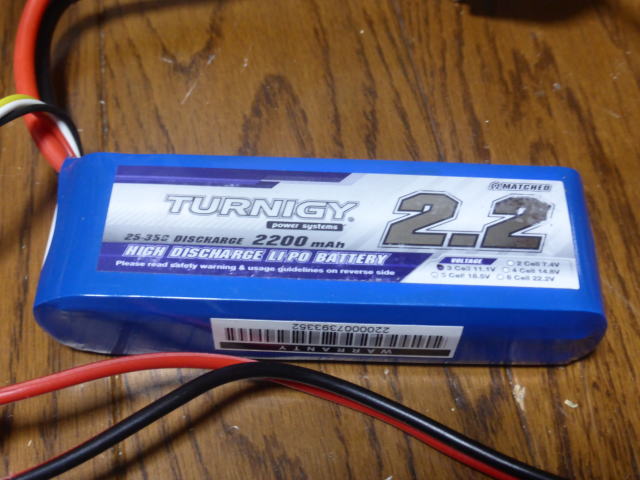 |
単3電池4本で6Vのバッテリーは電圧不足で使えなかったので別のバッテリーに交換します。 写真はリチウムポリマーバッテリーで容量は3Cell 11.1V 2200mAHです。 このバッテリーはクワッドコプター用に7年前に購入したものです。 使えるかどうか分かりませんが充電してみます。 |
 |
充電器はこれ、iMAX B6という充電器です。 |
 |
充電中です。 充電電流は1.5Aに設定しました。 |
| リポバッテリーを最上階に取り付けました。 ジャイロ基板を少し傾けて取り付けました。 重心の調整用としてクリップを2つ取り付けました。 だいぶん安定しました。 |
|
| 高さが高い方がバランスを取りやすいと思われるので高さを高くしました。 |