
3D僾儕儞僞4崋婡
H Belt偺帋嶌
摦嶌僥僗僩
2013擭6寧23擔
PR
3D僾儕儞僞4崋婡
H Belt偺帋嶌
摦嶌僥僗僩
2013擭6寧23擔
 |
庤攝拞偺僞僀儈儞僌儀儖僩偑傑偩撏偐側偄偺偱戙傢傝偵懢偝冇2掱偺偨偙巺傪巊偄傑偟偨丅 摦嶌僥僗僩偼偱偒傞偼偢偱偡丅 |
 |
僗僥僢僺儞僌儌乕僞乕晅嬤 |
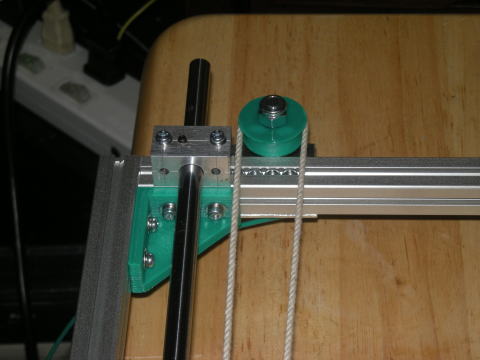 |
屌掕傾僀僪儔乕晅嬤 偙偺傾僀僪儔乕偼奜榞偵屌掕偟偰偄傑偡丅 |
 |
壜摦傾僀僪儔乕晅嬤丅 偙偺傾僀僪儔乕偼X幉僗儔僀僪儗乕儖偵庢傝晅偗傜傟偰偄傑偡丅 忋偺塃偺巺偑悅捈偵側偭偰偄傑偣傫丅 壓傕傢偢偐偵幬傔偱偡丅 偙傟傜偼堏摦嫍棧偺岆嵎傑偨偼儀儖僩偺娚傒側偳偺尨場偵側傝傑偡偺偱梫廋惓偱偡丅 |
 |
僉儍儕僢僕丅 帋嶌婡側偺偱僉儍儕僢僕偼壖偱偡丅 偲傝偁偊偢摦偔偐偳偆偐偺摦嶌僥僗僩偱偡偺偱僈僀僪儗乕儖傕徣棯偟傑偟偨丅 |
| 僼傽乕儉僂僃傾乕偼Marlin傪巊偄傑偟偨丅 CoreXY傪僒億乕僩偟偰偄傑偡丅 CoreXY偼H-Belt/H-Bot/H Gantry偺暿柤傜偟偄偱偡丅 僜僼僩偑僒億乕僩偟偰偄偨偺偼偁傝偑偨偄偱偡丅 傑偢X幉偍傛傃Y幉偺扨撈僥僗僩偱偡丅 偆傑偔摦偒傑偟偨丅 X幉偍傛傃Y幉傪扨撈偱摦偐偟偨帪偵傕2戜偺儌乕僞乕偑嫤椡偟偰夞揮偟偰偄傑偡丅 偪傚偭偲晄巚媍偱偡偹丅 X幉丄Y幉嫟偵250mm摦偐偟偰尒傑偟偨丅 摦嶌斖埻偼X幉偑250mm丄Y幉偼偨傇傫280mm掱搙傑偱摦偐偣偦偆偱偡丅 X幉偑塃偵傇偮偐偭偰偄傑偡丅 僛儘揰傪彮偟嵍偵堏摦偟偨傎偆偑傛偝偦偆偱偡丅 |
|
| 幚嵺偺報嶞僨乕僞傪巊偭偰偺XY幉摦嶌僥僗僩偱偡丅 報嶞偟偰尒側偗傟偽偼偭偒傝偼暘偐傝傑偣傫偑偆傑偔摦嶌偟偰偄傞傛偆偵尒偊傑偡丅 僞僐巺傪僞僀儈儞僌儀儖僩偵戙偊傟偽儀儖僩偑僗儕僢僾偟側偔側傝傑偡偺偱堏摦岆嵎偼儀儖僩偺怢弅暘掱搙偵廂傑傞偼偢偱偡丅 偙偺H Belt婡峔丄壜摦晹偵儌乕僞乕偑嵹偭偰偄側偄偺偑偄偄偱偡丅 偟偐傕僔儞僾儖偱嶌傝堈偔偍偦傜偔惢嶌僐僗僩傕埨偄曽偲巚偄傑偡丅 3崋婡偺XY僗儔僀僪夵椙宆偼暋嶨偱挷惍傕擄偟偔僐僗僩傕偐偐傝傑偟偨丅 僞僀儈儞僌儀儖僩偑撏偄偨傜嵞僠僃僢僋偟偰栤戣側偗傟偽崱屻偺庡椡婡峔偵偟傛偆偐側偲巚偭偰偄傑偡丅 |
