
3Dプリンター4号機改良
本体フレームに取付け
2014年9月9日
PR
3Dプリンター4号機改良
本体フレームに取付け
2014年9月9日
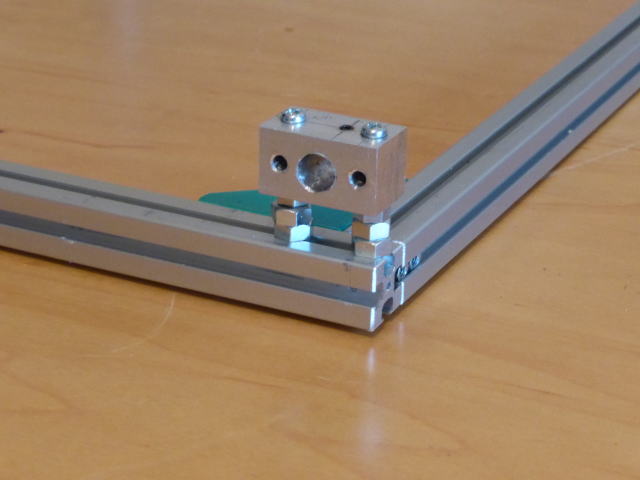 |
H-Botスライド機構は15mm角のアルミフレームの上に組み立てていました。 3Dプリンター本体とは独立した機構になっていました。 今回の改良では15mm角のアルミフレームを止めて20mm角の本体フレーム上に直接H-Botを組立ます。 左は自作のシャフトホルダーです。 高さが足りなくてナットを挟んであります。 |
 |
既製品のシャフトホルダーを買いました。 底面から軸のセンターまでの高さが20mmあります。 ナットを挟んで高くする必要はありません。 |
 |
20mm角の本体フレームに取り付けました。 |
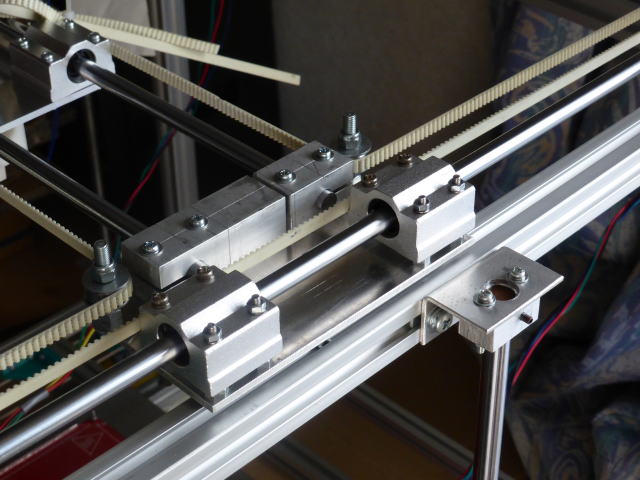 |
シャフトの位置が高くなってベルトとモータープーリーの高さが合わなくなりました。 ベルトの位置をモーターのプーリーに合わせるためリニアブッシュとアルミ板の間にナットを挟んでX軸全体を下げました。 |
 |
本体フレームに取り付けたH-Bot機構の全体像です。 |
 |
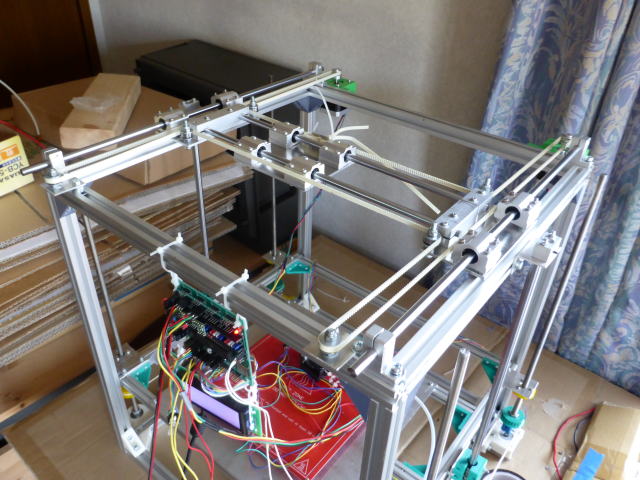
真上から見た様子です。 |
| XYの動作テストをしました。 速度は20000mm/miniに設定しました。 |
|
| テスト用印刷データで動かして見ました。 うまく動きました。 |
|
| 真上から見た様子です。 |
