 |
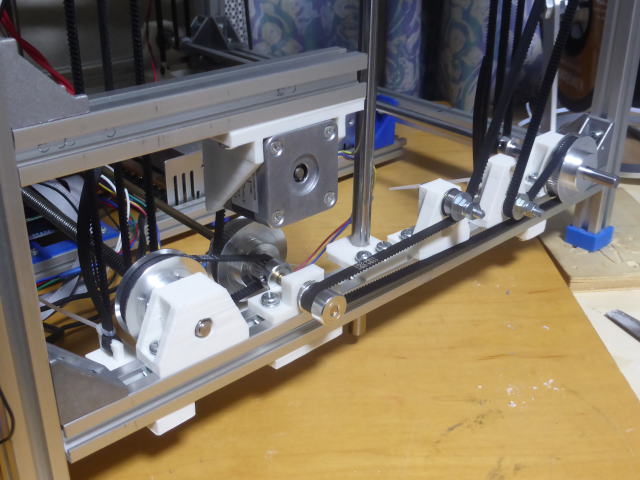
2本のシャフトをベルトで連結しました。 前のシャフトと後ろのシャフトを同期させるためベルトで連結しました。 モーターは1台になりました。 |
 |
テストのためシャフトを連結するプーリーとベルトは本体の外側に取り付けています。 最終的には本体内に取り付けます。 |
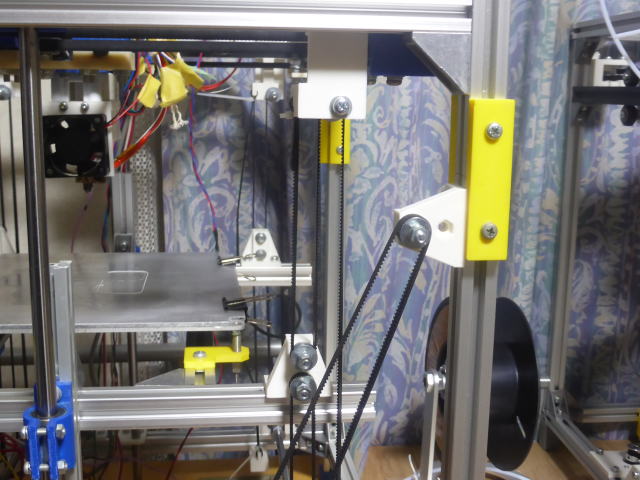 |
テンションプーリーです。 ベルトが長かったのでこのように遠くの位置になりました。 |
 |
|
| とてもスムーズに動きました。 トルク不足もなさそうです。 |
|
| 駆動部分のクローズアップ1 | |
| 駆動部分のクローズアップ2 | |
| 正面から見た動画です。 4箇所のベルトが全部同期して動くというこのスタイルがベストと思われます。 |
|
 |
モーターマウントと一段目のプーリー軸受けを一体化しました。 すっきりしました。 |
| 正常に動作しました。 | |
 |
上の方法は組み立て難くて良い方法では有りませんでした。 本体内部にアルミフレームを1本追加してそこにモーターを固定しました。 これなら組立は容易です。 |
| 正常に動きました。 | |
 |
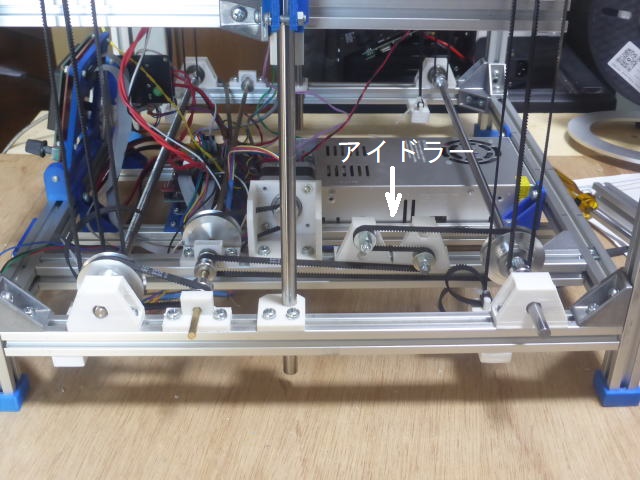
本体の外に付けていたプーリーとベルトを本体の中に移動しました。 ベルトが長いのでアイドラーを4個付けました。 長さを合わせたベルトが届いたらアイドラーは2個になる予定です。 |
| 正常に動きました。 | |
| 印刷中の動画 調子よく動いています。 |
|
 |
ベルトが届いたので交換しました。 アイドラーは2個になりました。 |
| 正常に動きました。 | |
| 正面から見た様子 Z軸のベルトドライブ化が完成しました。 主な特徴は下記の通りです。 ・プーリーによる減速(2段の減速比1/9) ・動滑車を採用(減速比1/2) ・4箇所のベルトにより4角が同期して動作。 |