3年前に作った電動スロットルクオドラントは動作はするもののレバーの動きはスムーズでなくぎこちない動きでした。 減速ギヤーのバックラッシュによるものと考えられます。 これを改善するためベルト駆動に改造したいと以前から考えていました。 1・駆動モーターをどうするか 2・エンドレスベルトの調達をどうするか 3・、どんなプーリーを使うか 4・どのようにベルトをかけるか 等多くの課題がありましたがこの度実際にベルトドライブ化の改造を実施しました。 この記事はその詳細です。 |
|
 |
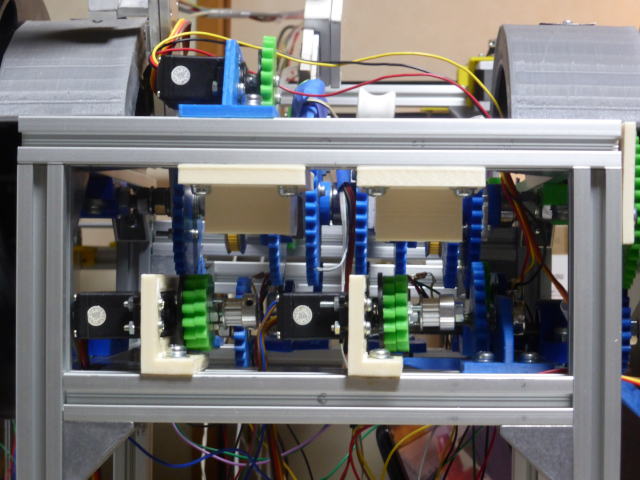
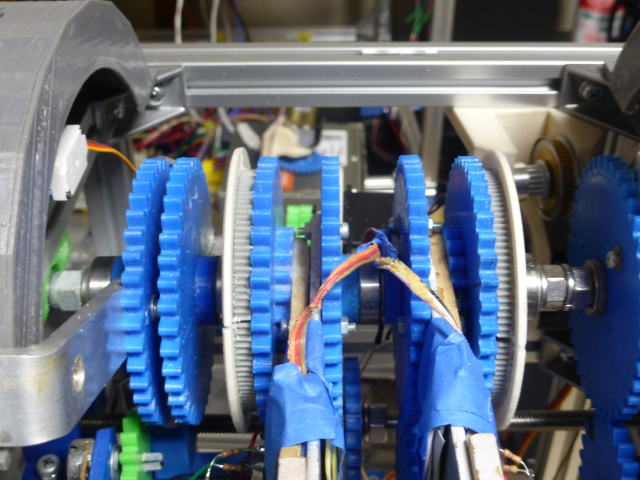
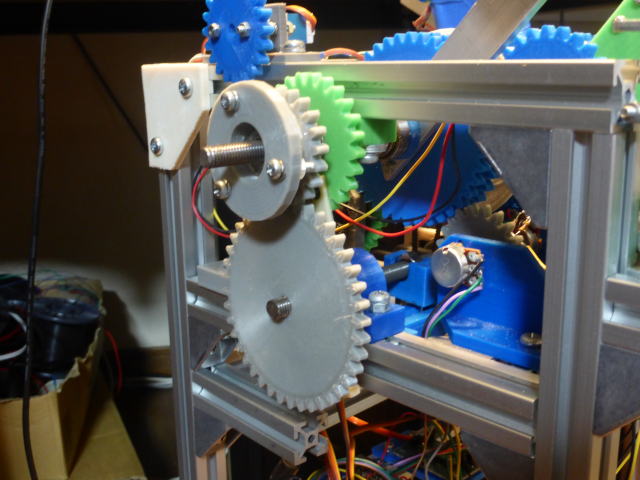
現在の減速ギヤの様子です。 歯数は1段目が15:40で2段目が15:80で総合減速比は1/14.2です。: もう少し減速比を大きくしたいところです。 |
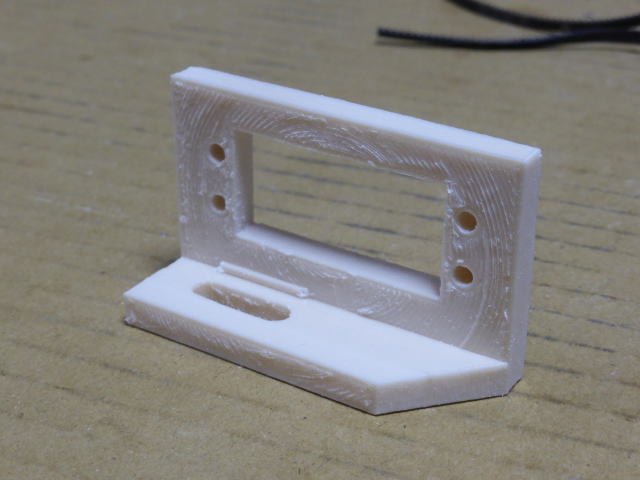 |
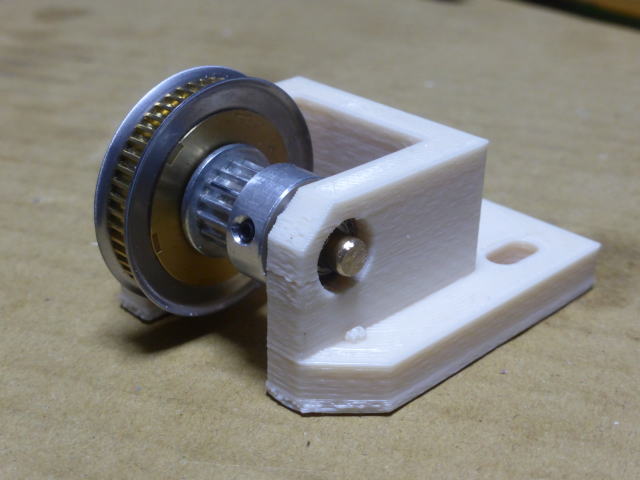
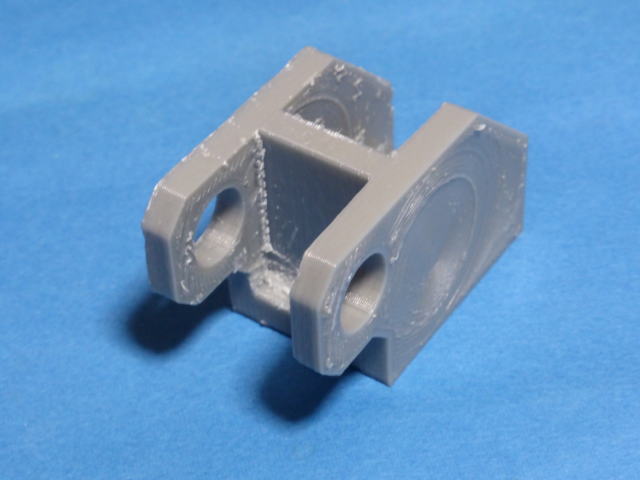
現在RC用サーボモーターを使っていますがギヤードモーターに変えてベルトかけは1箇所にするのがいいと思います。 ギヤードモーターの入手に時間がかかるのでモーターは現在のRC用サーボモーターで進めます。 したがってベルトによる減速は2段構成とします。 最初にサーボモーターのブラケッを作りました。 |
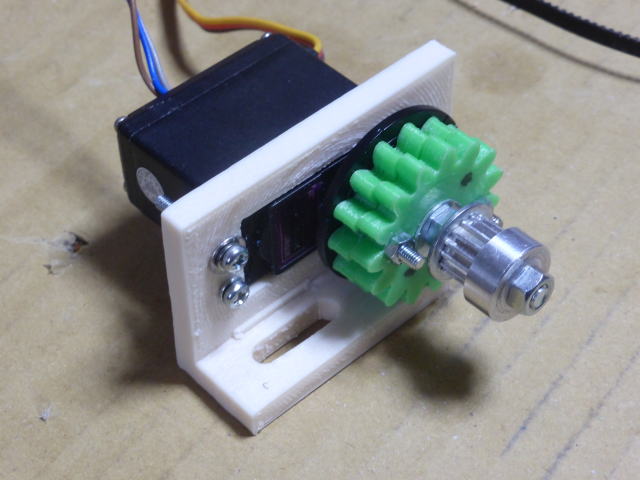 |
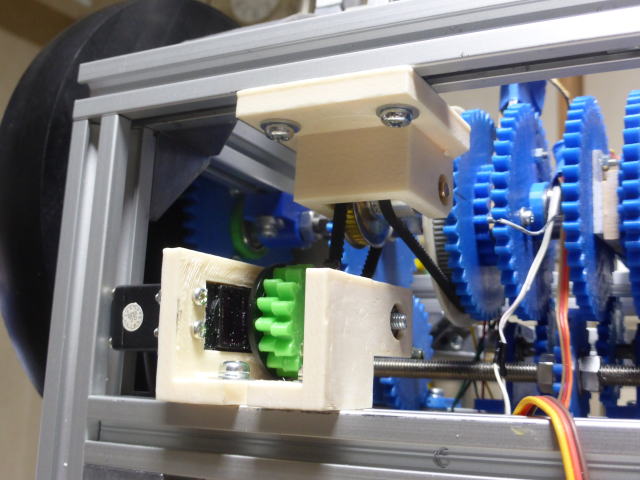
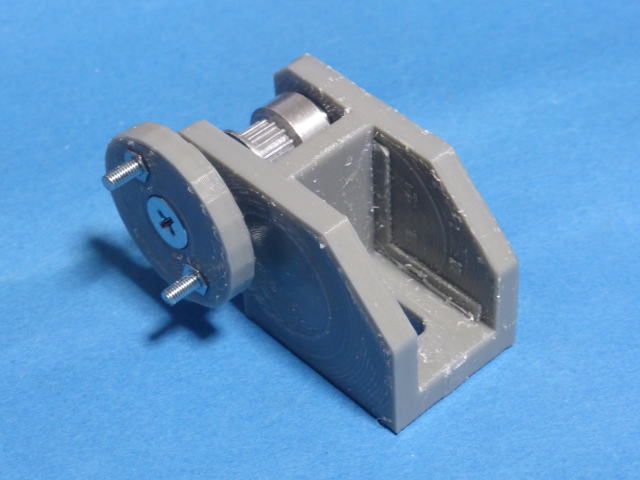
ブラケットにサーボモーターを取り付けました。 サーボモーターにプーリーを取り付けました。 このプーリーは3Dプリンターのステッピングモーターに使っているプーリーでタイミングベルト用のプーリーです。 歯数は16です。歯のピッチは2mmです。(GT2) サーボモーターの出力軸は短いのでプーリーを直接取り付ける事はできません。 写真のようにギヤ(緑色のパーツ)2枚を使って何とか取り付けました。 ギヤになっていますが意味はありません。 不要パーツを流用したせいです。 |
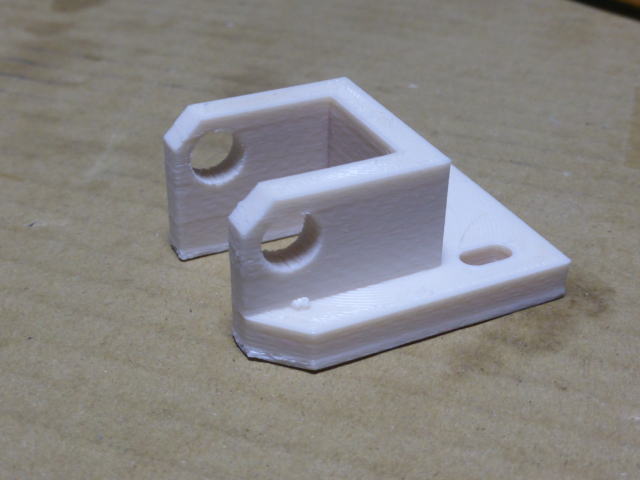 |
続いて減速用プーリーの軸受けを支えるブラケットを印刷しました。 |
 |
フランジ付きのベアリングを取り付けました。 内径は5mmです。 |
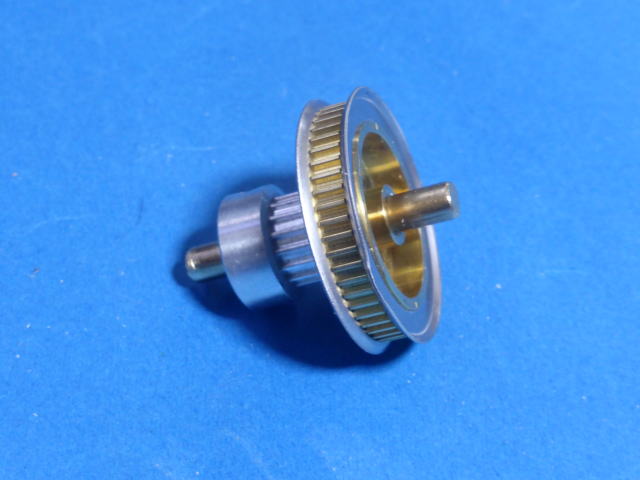 |
減速用のタイミングプーリーです。 小さい方のプーリーは歯数が16でサーボモーターにつけたものと同じです。 大きい方のプーリーは歯数が50で秋月電子で買ったステッピングモーター(700円)についてきたものです。 秋月電子ステッピングモーター 1段目のベルト・・・サーボモーターのプーリー(歯数16)から左の写真の歯数50のプーリーにかける 2段目のベルト・・・左の写真の歯数16のプーリーからスロットルレバーについている大ギヤ(GT2換算で歯数119)にかける。 プーリーの歯数と減速比をまとめると下記の通りです。 1段目・・・16:50(減速比3.125) 2段目・・・16:119(減速比7.44) 総合減速比・・・1/23.25 以前の減速比より1.6倍大きくなります。 |
 |
ブラケットにプーリーを取り付けました。 歯数50のプーリーには軸に固定するねじがついていません。 歯数16のプーリーとエポキシ接着剤で接着しました。 |
| テスト用のフレームに取り付けて回してみました。 サーボ用のプーリーの先端がフリーのままではベルトの張力に負けて軸がまがってしまいました。 ベルトの張力に対抗するため軸受けを追加しました。 大きい方のプーリーに手で負荷をかけても滑る事なく回転しました。 なお1本のベルトの両端をつないで輪にしています。 方法は細い針金で縛っただけです。 緩まないよう半田で固めました。 タイミングベルトの歯の連続性は損なわれますが正確に同期させる必要はないのでよしとします。 ちなみにサーボモーターはポテンショメーターの線を外部に取り出すと同時に360度回転可能なようにストッパを外すという改造をしています。 なので連続して回転しています。 |
|
 |
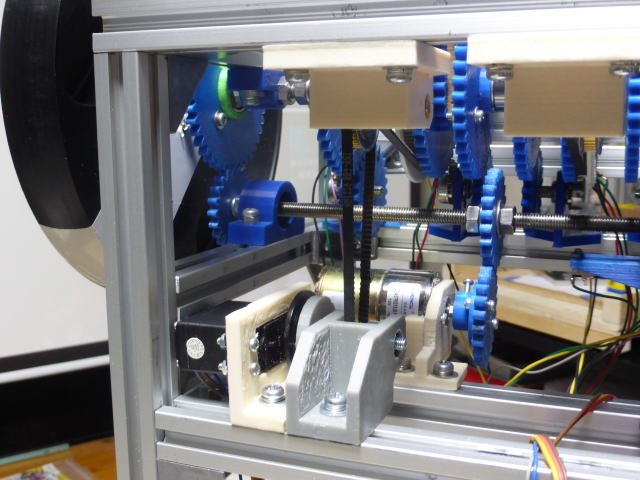
TQ本体に取り付けました。 プーリー先端側の軸受けはまだつけていません。 |
 |
上から見た様子です。 後は大ギヤへのフランジ取り付けとベルト掛けです。 ベルトは本来ならエンドレスの輪になったものを用意すべきですが面倒なので長いベルトを切ってつなぎます。 一度もした事がないのでうまくつなげられるか心配です。 |
| 回してみました。 ベルトは1段目のみです。 2段目のベルトはまだついていません。 正常に回りました。 1段目のベルト機構はこれでOKです。 |
|
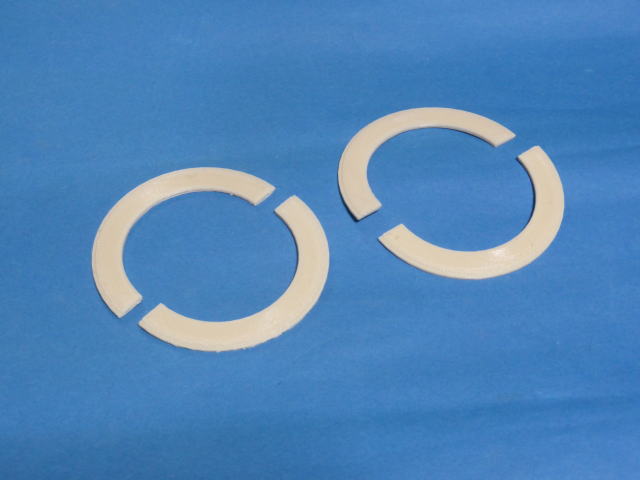 |
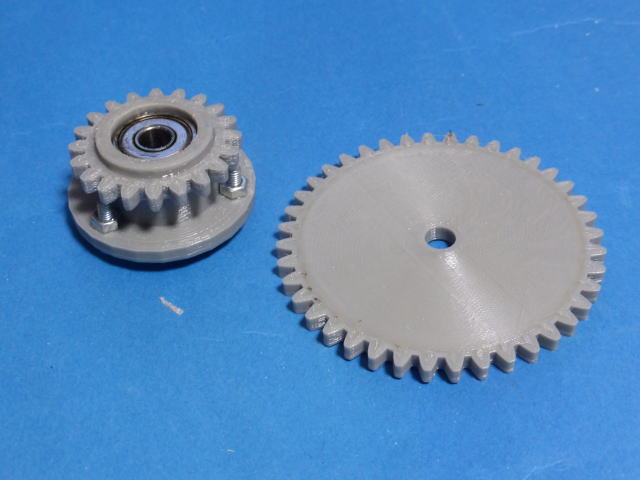
スロットルレバーにはφ80の大きなギヤが付いています。 ギヤの両面に写真のようなフランジを接着してプーリーにしようと考えています。 ギヤの歯のピッチはタイミングベルトと一致していません。 本来ならベルトに合わせたピッチのギヤにすべきですが摩擦による伝導に期待します。 |
 |
レバーに伝える力が相当大きく摩擦による伝導では滑りが発生する可能性が高いので考えを変えました。 写真のように歯数119、ピッチ2mmのギヤーを作りました。 3Dプリンターで作るのでこんなギヤも簡単にできてしまいます。 直径は大ギヤより5mm小さくして75mmにしました。 このギヤーの両側にフランジをつければ立派なプーリーになります。 |
 |
作成したプーリーの片側にフランジを接着しました。 |
 |
このプーリーを1/4(角度90度)で切断しました。 切断する理由はTQ本体を分解しないで取り付けるためです。 |
 |
大ギヤに今回作ったプーリーの3/4の方を接着しました。 |
 |
プーリーの残り1/4を接着しました。 大ギヤ(青)の直径はプーリーの直径より大きいのでベルトのはずれ止めのフランジになっています。 歯の連続性は損なわれていますが正確な同期を必要としないのでよしとします。 |
 |
もう一方も接着しました。 |
 |
2本のベルトをかけました。 |
| 右側のスロットルレバーの動作テストを実施しました。(後ろから見ています。) うまく動きました。 バックラッシュはなくスムーズに回転しました。 |
|
 |
左側のスロットルレバー(写真では右側)にもベルト機構を取り付けました。 |
| 左側のスロットルレバーの動作テストを実施しました。 こちらもうまく動きました。 ギヤの場合より動きがスムーズに見えます。 |
|
 |
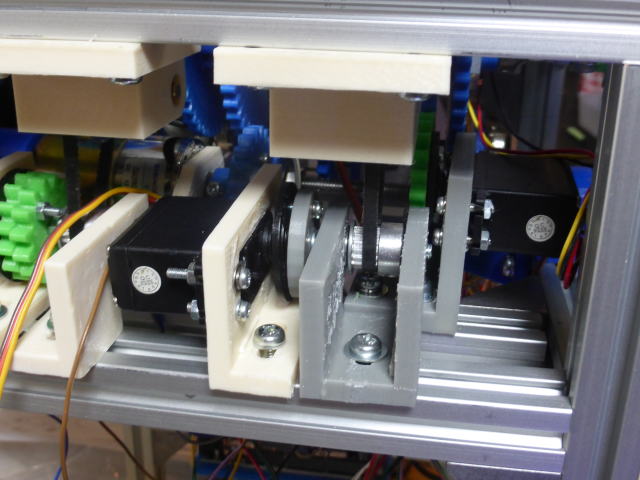
ベルトが滑ってうまく動かない場合が発生しました。 タイミングベルトを強く張る必要がありますが今の仕組みではサーボモーターの出力軸に負荷がかかって心配です。 それを回避するため写真のようにぷーりーの両側を支持する軸受けを作りました。 円盤から突き出しているネジはサーボモーターのホーンの穴に差し込みます。 差し込むだけで固定はしません。 ホーンの穴がバカ穴なので多少の軸ずれがあっても問題になりません。 ホーンとこの円盤で動力伝達カップラーになっている訳です。 |
 |
取り付けました。 |
| 動作テスト とてもスムーズに回りました。 ベルトを強く張ることができて滑りはなくなりました。 |
|
 |
もうひとつの軸受けを印刷しました。 補強を追加したり不要なコーナーをカットしました。 ブツブツはサポート材を除去した跡です。 左の面を下にして印刷したのでサポート範囲は広かったです。 |
 |
プーリーを付けました。 一つ目より丈夫そうです。 |
 |
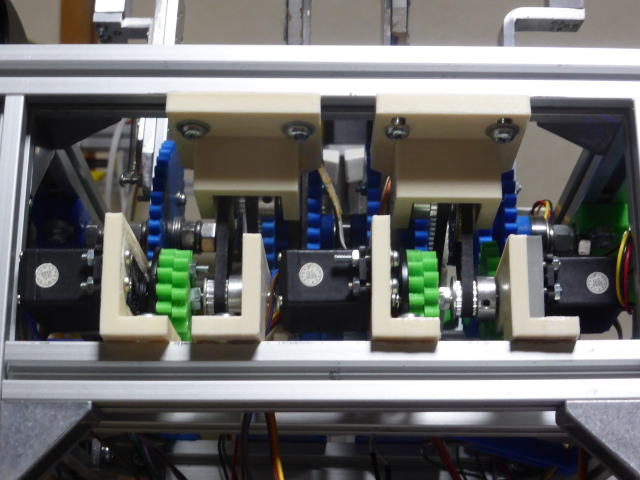
本体に取り付けました。(左側) |
| 動作テスト 正常に動きました。 |
|
| 2つのスロットルレバーを同時に動かしてみました。 サーボモーーターによる制御なので手で動かしても元の位置に戻っています。 |
|
| 飛行中の様子 画面内のスロットルレバーと現物のスロットルレバーが連動しているのが見えます。 トリムホイールも連動していますが回転数が少ないので動きが小さく少し分かりづらいです。 改善したい課題です。 |
|
 |
一段目のベルトの長さが短いためスペースが狭くメンテナンスし難くかったです。 ベルトを長くしてスヘースを広げました。 写真のように広くなって調整し易くなりました。 |
| 動作テスト 回転は問題ありません。 ベルトの張力調整はし易いです。 |
|
| 左側スロットルレバーのベルト機構も改造しました。 | |
 |
[トリムホイールについて] スロットルレバーのベルトドライブ化で広いスペースが必要でした。 スペースを空けるためトリムホイール用のモーターの位置を変えました ついでに気になっているところを治しました。 |
動作テスト 正常に回転できました。 ちょっと分かりづらいかもしれませんが長ねじの左についている青い部分にはスライド抵抗が入っています。 このスライド抵抗がサーボモーターの位置検出ポテンショメーターになっています。 |
|
| 音も静かになり、スムーズに回るようになりました。 | |
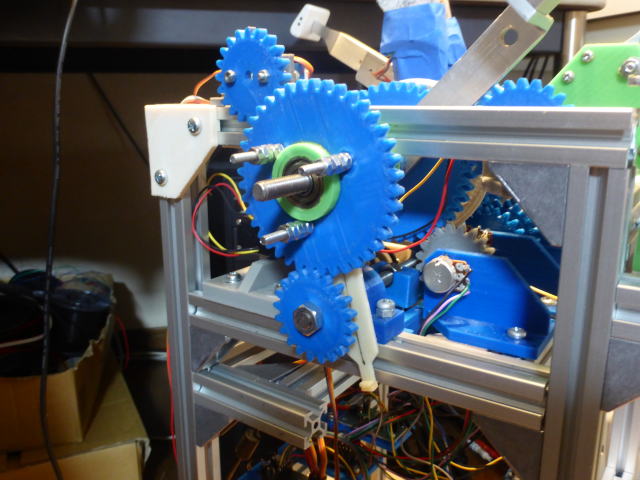 |
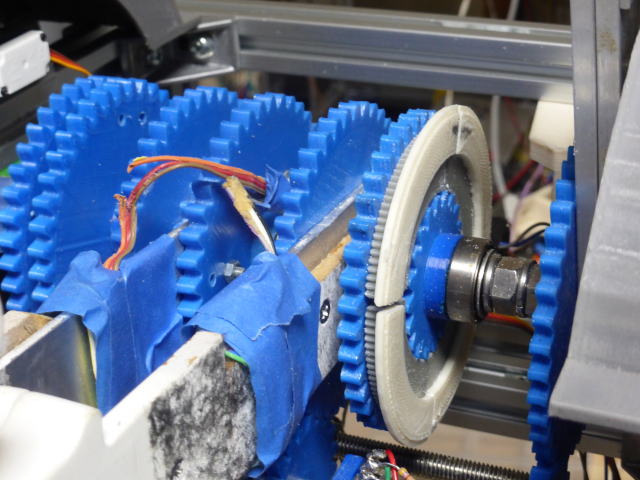
トリムホイールの回転数が少ないのを改善します。 現在、トリムホイールには20:40の減速ギヤがついています。 下の軸に対して回転数は1/2になります。 ちなみに下の軸はモーター軸と20:20のギヤで連結されています。 |
 |
トリムホイールの改造用ギヤを印刷しました。 |
 |
トリムホイールの改造用ギヤを本体に取り付けました。 ギヤ歯数は40:20ですので回転数は下の軸に対して2倍になります。 現在の回転数との比較では4倍になります。 |
| 動作テスト 速く回るようになりました。 |
|
前のページへ戻る
次のページへ行く
メニューページに戻る