
3Dプリンターのコストダウン
Core XYを試す
2015年7月17日
PR
3Dプリンターのコストダウン
Core XYを試す
2015年7月17日
 |
左はH Bot機構の原理図です。 この図は下記のホームページから引用させていただきました。 http://www.anthonyvh.com/2013/05/21/halubot-part-1/ |
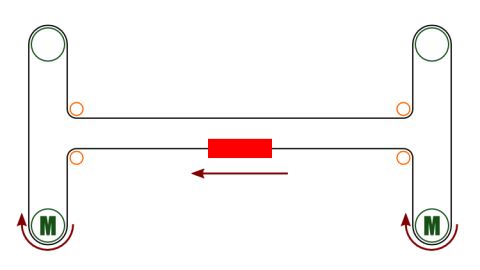 |
2つのモーターが同じ方向へ回転するとX軸が動きます。 |
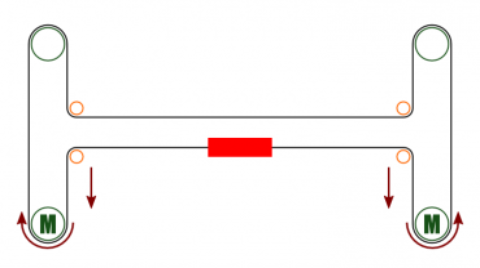 |
2つのモーターが逆方向に回転するとY軸方向に動きます。 |
 |
H BotはX軸が傾き易いです。(傾くとはY軸とX軸の角度が90度でなくなる事) なぜならX軸が傾くのをベルトが防止する仕組みにはなっていないからです。 X軸が傾くのを防止するにはY軸キャリッジの遊びを小さくしてY軸とX軸の直角剛性を強くする必要があります。 Y軸の遊びを抑えるため写真のようにレールの左右をローラーで挟む構造にしました。 一応この方法でX軸の傾きは目で見てわからない程度に小さくなりました。 しかしもっと良い方法があったのです。 Core XYと呼ばれる仕組みです。 Core XYという名前もベルトをクロスさせるのも知ってはいましたがX軸の傾きをベルトが防止する機能を持っている事は知りませんでした。 |
 |
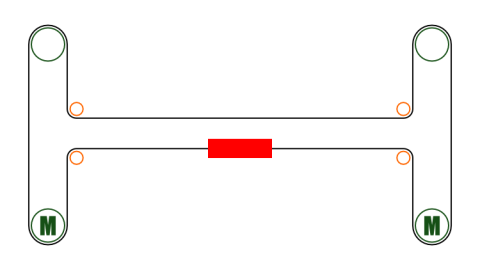
左はCore XYという機構の原理図です。 この図は下記のホームページから引用させていただきました。 http://corexy.com/theory.html メカ的な部分はH Botとほとんど同じですがベルトの張り方が違っています。 このようにするとX軸が傾く力は発生しないとのことです。 絵をみてすぐに理解できました。 たとえば左の図においてX軸を時計方向に傾ける力を加えたと仮定します。 X軸が時計方向に傾くためには赤いベルトがゴムのように伸びる必要があります。 しかしベルトはゴムでできてはいますが繊維が入っているので伸びません。 従ってX軸は傾く事はない訳です。 こんどはこのCore XYを試してみたいと思います。 結果が良ければY軸のキャリッジをもとに戻せるかもしれません。 |
 |
アイドラー2個追加してベルトを架け替えたらはい出来上がり。 1時間でCore XYに変わりました。 上の図とは前後が逆になっています。 厳密には2本のベルトの高さを変えるのが正しいようですが今回は手前の4個のアイドラーのうち2個のアイドラーだけを高くしてベルトのクロス点が接触しないようにしました。 |
| 印刷してみました。 調子いいです・ |
|
| 動画をもうひとつ |