 |
Z軸のベルトドライブ化を試したくてamazonでプーリーやベルトを探しましたら写真のセットを見つけました。 歯数20のプーリーと歯数60のプーリーに周長200mmのベルトが付いていてそれが2組でセットになっています。価格は1094円でした。安いと思います。 中国からの発送のようで到着は10月18日〜10月26日です。 これを使ってZ軸のベルトドライブ化を試してみます。 ベルトドライブ化の理由は下記の2点です。 1.左右Z軸の同期 2.リードスクリューの曲がりによりベッドが左右に揺れるのを排除 数日前にリードスクリューをベルトで連結する計画をアップロードしていますがその時のプーリーのボア径は8mmです。 今回のボア径は手持ちシャフトを利用したいという理由で5mmで計画しています。 ボア径が違うのでプーリーの共用は出来ないです。 |
 |
仕組みはこんなかんじです。 小さいプーリーは1回転でベルトが40mm動きます。 減速比は1/9になりますのでモーター1ステップ(1/200回転)に対してZ軸は0.022mmの動きになります。 従来のリードスクリューの場合はリードスクリューのピッチが8mmなのでモーター1ステップに対してZ軸は0.04mmの動きになります。 ソフトでパルス数を合わせれば問題ないと思います。 一番左の小さいプーリーにかかっている上方向に行っているベルトはZ軸のキャリッジに繋ぎます。 長いシャフトは右側のZ軸付近の小さいプーリーを回転させます。 その小さいプーリーにベルトをかけて右側のZ軸のキャリッジに繋ぎます。 こうして左右のZ軸は同期して動かす事ができます。 数日前にアップロードしたリードスクリューをベルトで連結して同期させる計画と今回の計画はどちらもZ軸が対象で無駄じゃないかと言われそうですがどちらも試してみたいのです。 いろいろ試してみるのが楽しいので部品の到着順に試そうと思っています。 私個人の推測ではこちらのベルトドライブの方がいいんじゃないかなと思います。 少なくともリードスクリューの曲がりの影響は排除できますので。 デメリットとしてはZ軸の下の方のスペースを使うのでZ軸の有効ストロークが減少する事です。 必要ならまた改造すれば良いことなので当面はストロークが短くなっても良しとします。 |
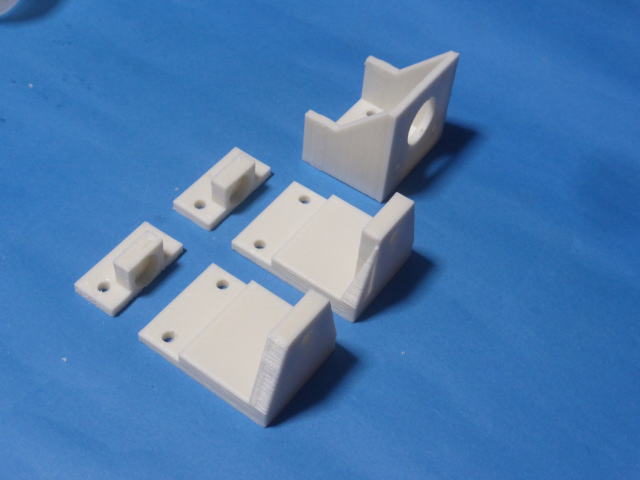 |
プーリーとベルトのセットが届くまでの間にできる事を進めます。 樹脂パーツを印刷しました。 |
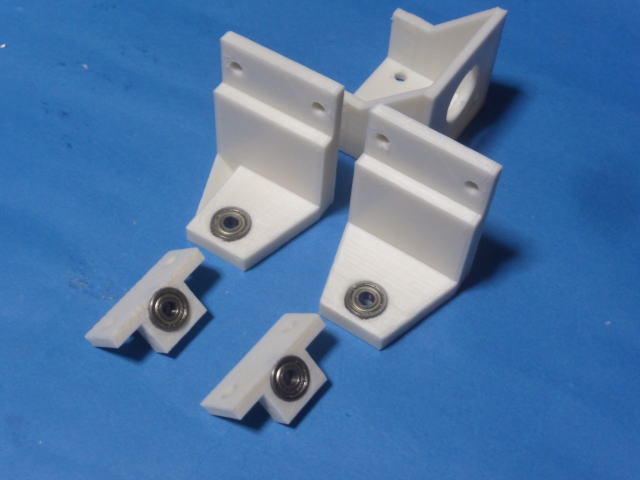 |
ボールベアリングを取り付けました。 |
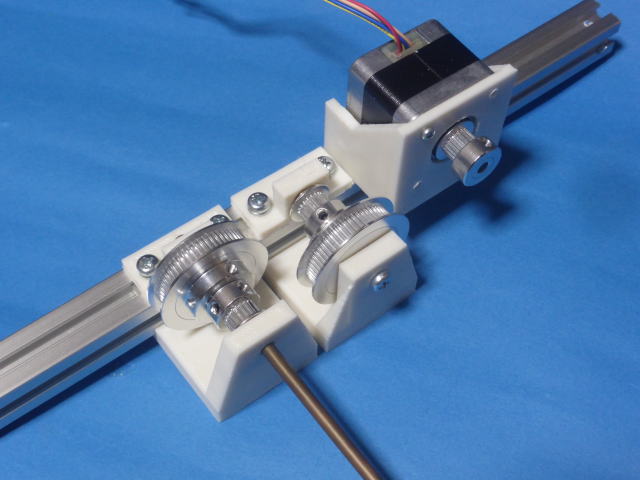 |
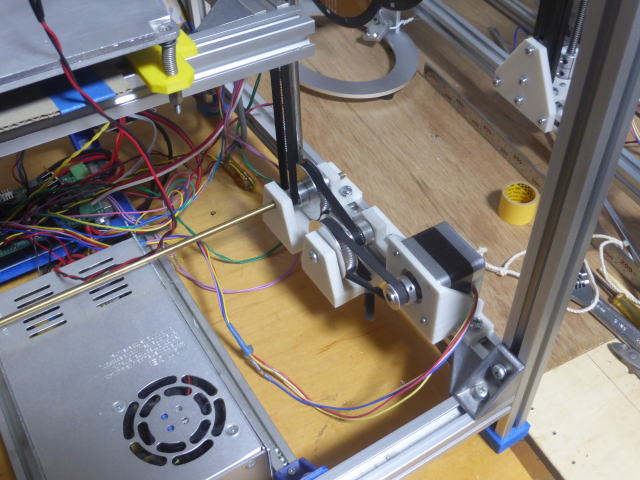
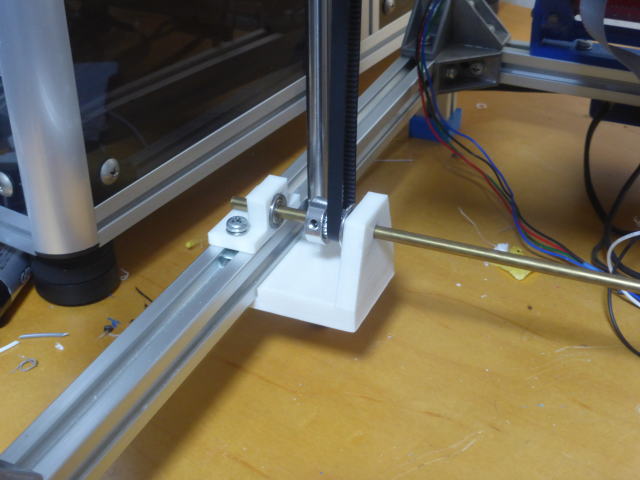
仮に組み立てました。 大きいプーリーは未だ届いていないのでボアφ8のプーリーを使っています。 |
| 動作テスト タイミングベルトの代わりに輪ゴムを使っています。 輪ゴムが延びるので回転が少し遅れます。 動作的には良好です。 |
|
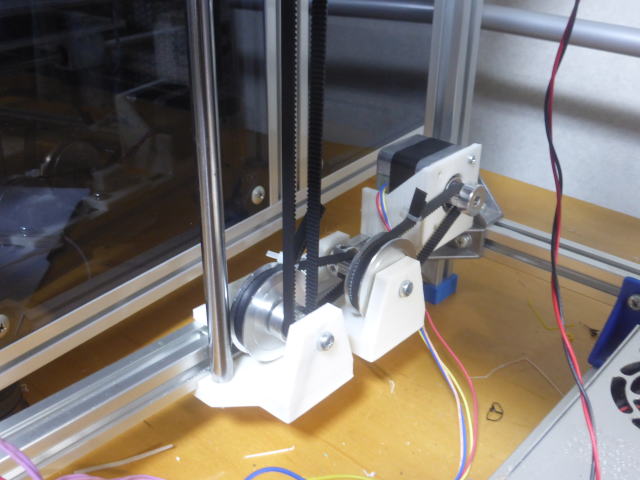 |
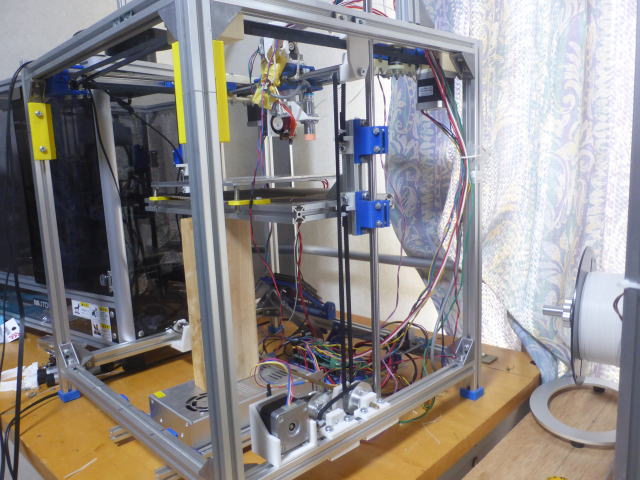
改造中の大型CoreXY 3Dプリンターに取り付けようと思いましたがアイドラーを固定する場所が無いという理由で小型CoreXY 3Dプリンターに取り付けました。 従ってZ軸はリニアシャフトです。 エンドレスが未だ到着していないので結束バンドで繋いでいます。 とりあえずトルクの伝達を調べるためです。 モーターの軸を1回転程できますがそれ以上は回転させることはできません。 |
 |
後方から見た様子 |
 |
アイドラーを取付てベルトをかけてみました。 |
 |
アイドラーを内側から見た様子 アイドラーをもう少し左方向に移動する必要が有りますがニアシャフトのブラケットと干渉してできません。 作り直しが必要です。 |
 |
リニアシャフトブラケットとアイドラーブラケットを一体で作りました。 |
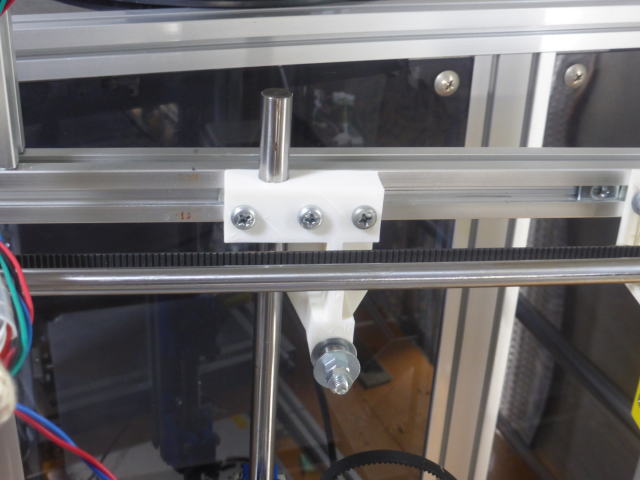 |
アイドラーを取り付けました。 これなら大丈夫です。 |
 |
アイドラーの位置もピッタリです。 |
 |
左側のZ軸全体です。 |
 |
モーター付近 |
 |
右側のZ軸も部品を取り付けました。(後方から見る) プーリーの軸は左側のプーリーにも固定されています。 これで左右のZ軸を同期させます。 こちらにはモーターを付けない予定ですがトルクが不足したら付けます。 |
 |
Z軸右側駆動プーリー(後ろから見る) |
 |
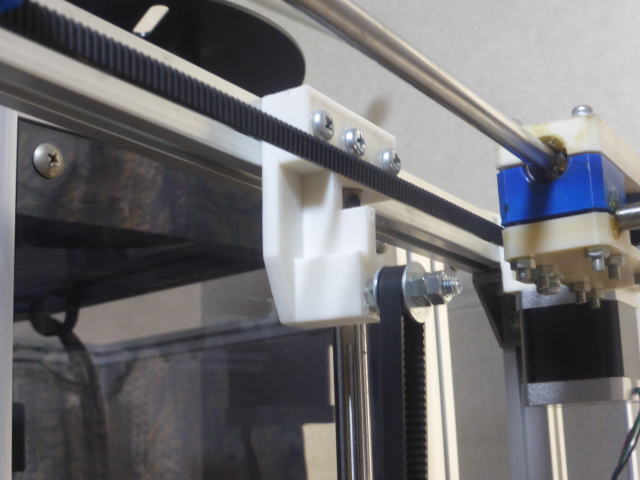
Z軸右側のベルトフックの様子(後方から見る) 白い2つの樹脂パーツがベルトフックです。 |
 |
Z軸右側アイドラー |
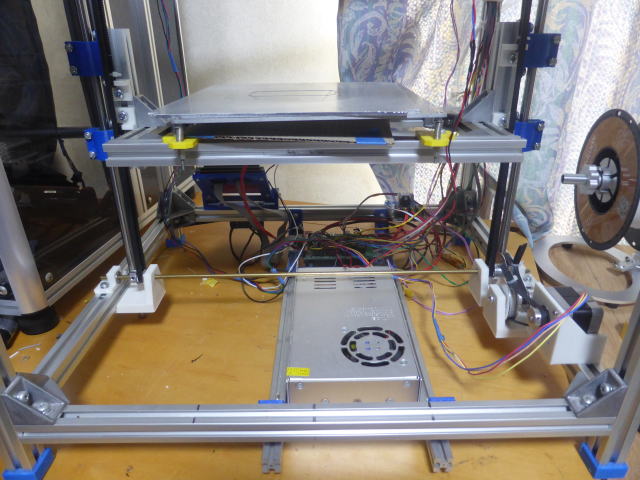 |
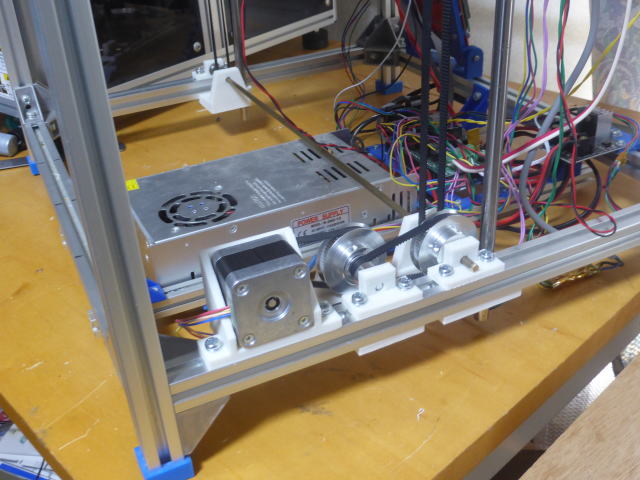
Z軸駆動部(後ろから見る) 組立は完了しましたが減速用のベルトがエンドレスじゃないので試運転はできません。 部品が到着するまで待機します。 |