 |
左のようにZキャリッジに動滑車を付ける事で駆動トルクを1/2にする事ができます。 ヒートベッドフレームが結構重いのでこの動滑車を試す事にしました。 動滑車により1/2の減速効果もあるので1/9の減速機を1段省いて1/3にできるかもしれません。 |
 |
樹脂パーツを印刷しました。(左側のみ) |
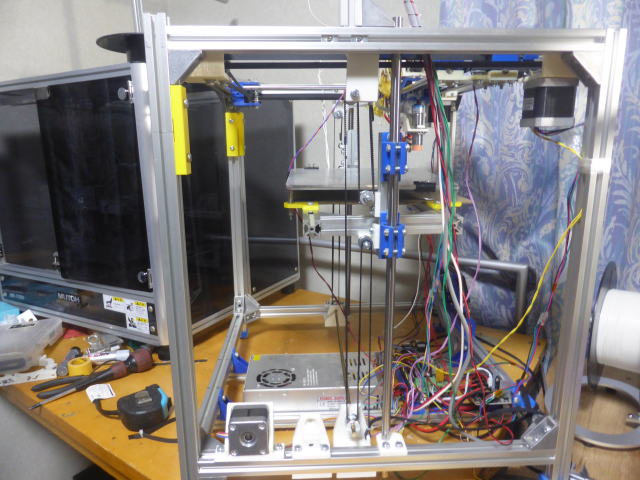 |
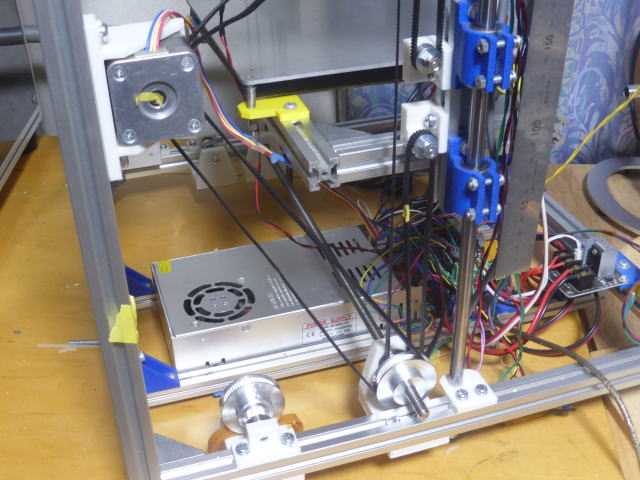
小型CoreXY 3Dプリンターに取り付けました。(全体の様子) |
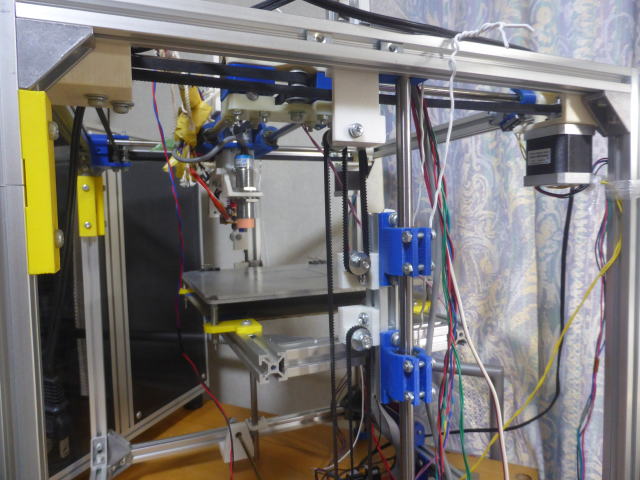 |
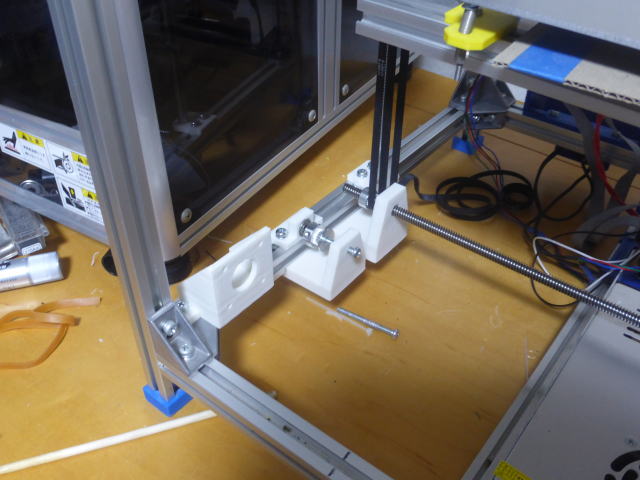
動滑車がヒートベッドフレームに固定されています。 |
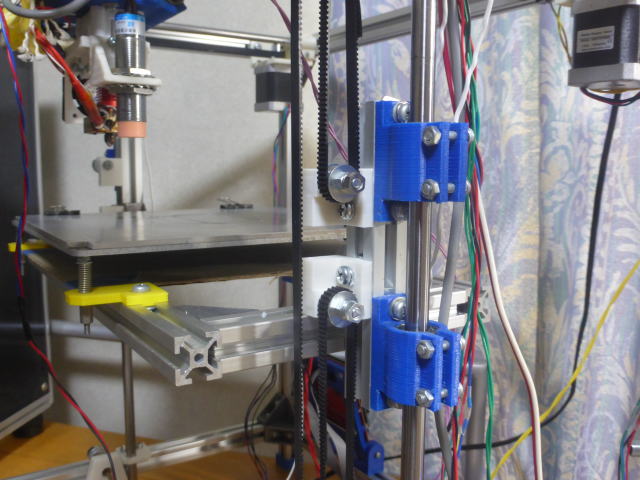 |
動滑車付近のクローズアップ |
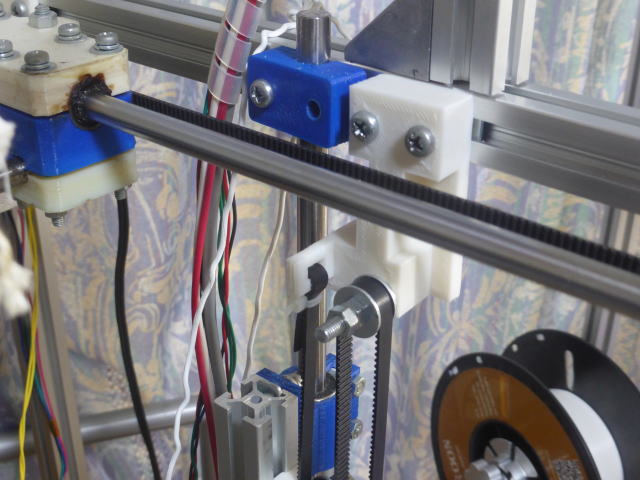 |
アイドラーです。 |
 |
下部の減速機付近です。 |
 |
右側です。 ヒートベッドに動滑車が2個取付て有ります。 その上にはアイドラーが有ります。 |
 |
右側のドライブシャフトとタイミングプーリーです。 動力は右側の減速機からシャフトを介して供給されるのでこちらには減速機やモーターを設置しない予定でしたが気が変わりました。 トルクの余裕を持たせるためこちらにもモーターと減速機を設置する事にしました。 |
 |
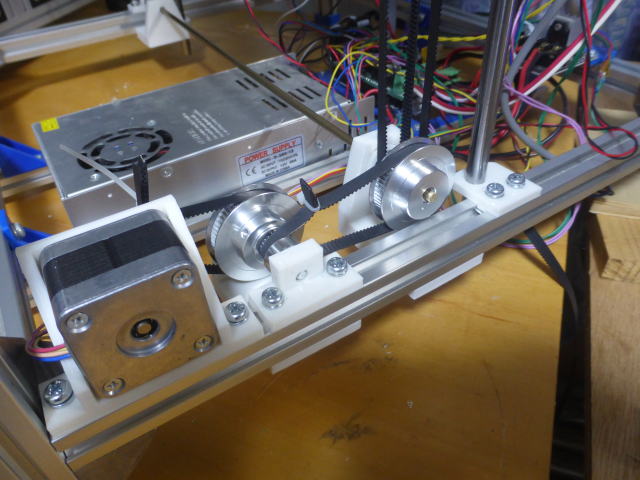
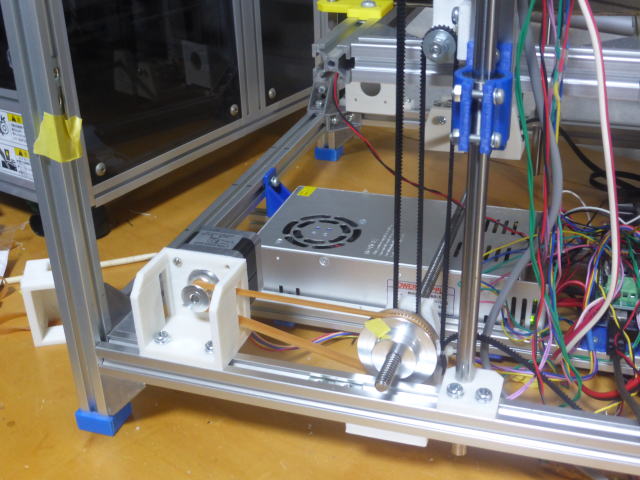
部品が揃っていませんが予備テストを実施します。(左側駆動部) 1.シャフトを8mmに変えました。 丸いシャフトが無かったので8mmのリードスクリューを流用しました。 2.1段目のベルトにはエンドレスにしないと回せないのでオーバンド(輪ゴムの太いやつ)を使いました。 3.2段目のベルトは輪になっていないタイミングベルトを結束バンドで繋ぎました。 4.輪ゴムを伸ばすためモーターを柱の高い位置に取り付けました。 |
回して見ました。 ソフトを修正していないので動きが遅く小さいですが正常に動きました。 モーターと減速機はまだ片側のみです。 片側だけでもトルクは足りているようです。 一段目のベルトが輪ゴムなのでちょっと変な動きになりました。 |
|
 |
いろいろやってみようという事で減速機を1段省いてみました。 |
| 動きました。 減速機は1段でも良いようです。 動滑車による1/2の減速効果が効いているようですね。 しかも今モーターは1台で動いていますので2台にすれば余裕も充分です。 モーターに加えるパルス数について (モーターは200バルスで1回転します。) リードスクリューの場合(ピッチ8mm) 1mm動かすのに必要なバルス数・・・200/8=25 marlinの設定値(16倍)・・・25*16=400 今回のテストの場合(プーリー周長40mm) 1mm動かすのに必要なバルス数(減速比3x2を考慮)・・・(200*3*2)/40=30 marlinの設定値(16倍)・・・30*16=480 |
|
| 試しに1mm動かすのに必要なパルス数を変えてみました。 marinの設定値480のところを960にしました。 結果として速度が2倍になって10mmの動きが20mmに、1mmの動きが2mmになります。 脱調するかもしれないと思いましたが異状なく動きました。 モーターのトルクはまだ余裕が有りそうです。 |
|
 |
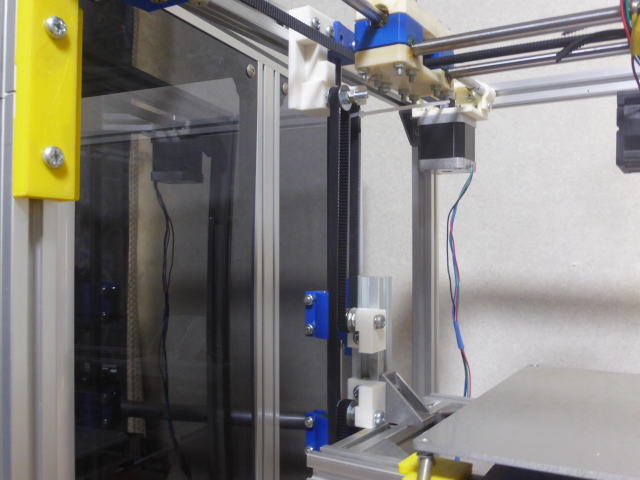
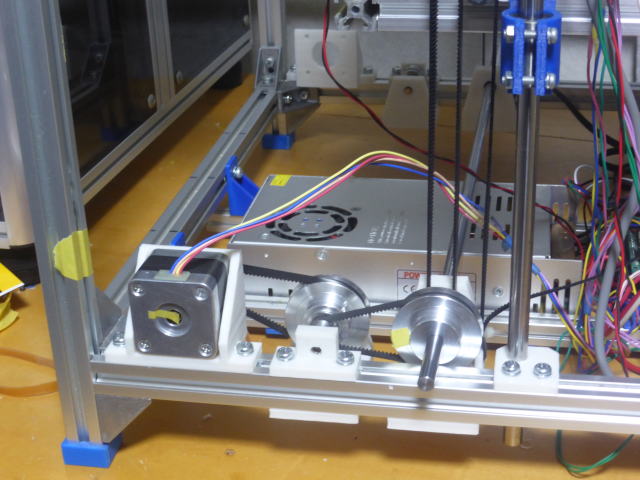
減速機を一段にした場合Z軸のモーターが外枠から飛び出す事が分かったので取付方向を変える事にしました。 出力軸を外側に向けるように変更したZ軸モーターマウントです。 |
 |
取り付けました。 |
 |
ベルトは未だ届いていないのでオーバンド(輪ゴム)です。 |
| 動かしてみました。 異状なしです。 |
|
 |
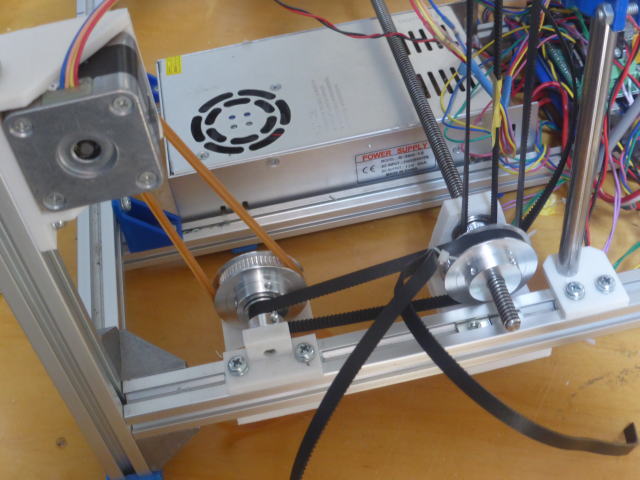
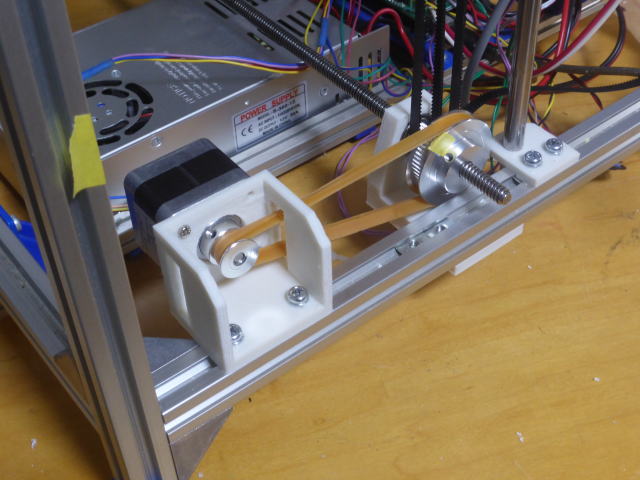
減速機は1段でもトルクは足りているようですが分解能が落ちるので2段に戻しました。 今までベルトを結束バンドで繋いでいましたが繋ぎ目のせいで動作範囲に制限がありました。 なんとかならないかなと考えていたら今朝起床したら突然頭に浮かびました。 針金で繋いでみたらいいんじゃないかと。 ベルトに小さな孔を明けて0.5mmのメッキ線で繋ぎました。 これでつなぎ目が引っかかることなく動作させる事ができると思います。 ベルトの長さは注文品と同じ200mmにしました。 シャフトを8φのリニアシャフトに替えました。 |
| 動かしてみました。 ヒートベッドの移動距離が正しくなるようパルス数を合わせました。 最高速度も上げました。(7mmsec) とても調子よく動きました。 1段目の大きいプーリーが揺れているのは5mmのシャフトにボア8mmのプーリーを取り付けているからです。 中心合わせが正確でないため揺れています。 ボア8mmのプーリーにすれば揺れはなくなります。 |
|
| 長い動きは1回当たり10mmです。 短い動きは1回当たり1mmです。 |
|