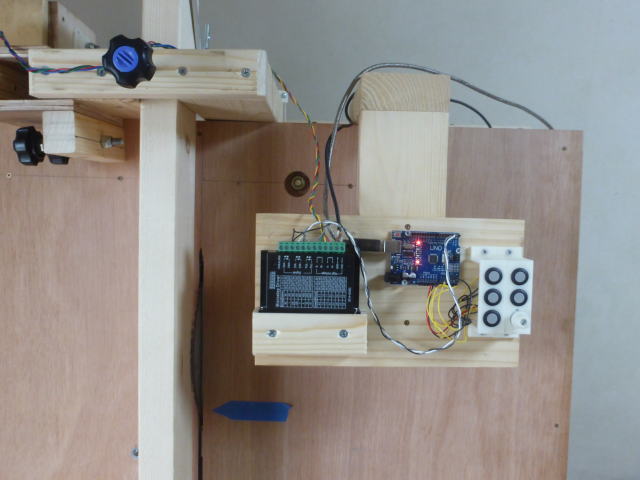
現在CPU基板は3Dプリンターで使っているArduino MEGAを使っています。 パネルソー用として入出力の端子数を数えるともっと小型のCPUで足ります。 CPUをArduino UNOに交換します。 ついでに丸鋸の現在位置と設定速度を表示するLCDディスプレイを追加します。 |
|
 |
交換するCPU基板はこれです。 Arduino UNO 純正品だと3000円ですがこれは非純正品で650円です。 |
 |
CPUを交換しました。 ソフトは変更せずにそのまま動きました。 操作し易くするため制御基板を少し下に下ろしました。 |
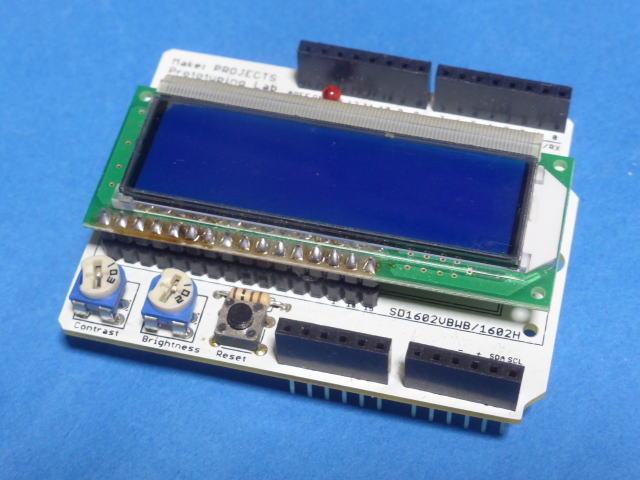 |
ディスプレイはこれです。 以前購入したもので現在使っていないので利用します。 これを動作させるソフトはArduinoのライブラリにあります。 |
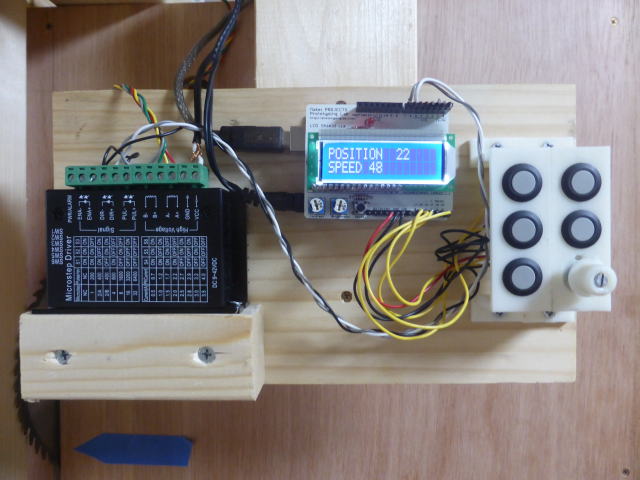 |
ディスプレイを取り付けました。 ソフトにはディスプレイの処理を追加しました。 最初動きませんでした。 原因を調べたところ、ステッピングモーターへの出力2本とディスプレイが使用するピンに競合がありました。 ステッピングモーターへの出力2本のピン番号を変更して動きました。 |
| ただこの動画の通りカタカタと断続的に動くようになりました。 ソフトウエアの作りとして2mmスライド毎にパルスを発生させるループがあります。 このループ内にディスプレイの処理が加わりました。 ディスプレイの処理に時間がかかるようです。 2mm動く度にパルスが発生しないので一瞬止まってしまうのです。 この問題を解決するのはちょっと難しいです。 |
|
| パルスの発生を定期的な割込み処理にするとできそうです。 ディスプレイの処理を実行中でも割込みならディスプレイの処理を中断してパルスを発生させられます。 割込みの繰り返し周波数を変更すればスライド速度の変更ができます。 スライド速度が最も速い場合のモーター回転数は4rpsくらいになります。 1回の割込みで1パルス出力するとしたならば割込み周波数は4X360=1440Hzです。 8倍のマイクロステップを使うとすれば11520Hzです。 周期としては86μsecになります。 割込み処理をこの時間内、例えば80μsec以下で処理できればうまく動くと思います。 CPUのクロック周波数は16MHzですのでいけそうな感じがします。 トライしてみます。 |
|
| 割込み方式でうまく動きました。 カタカタという断続動作はなくなりました。 切断後の戻り時は速度設定にかかわらず最高速度で戻るようにしました。 |
|
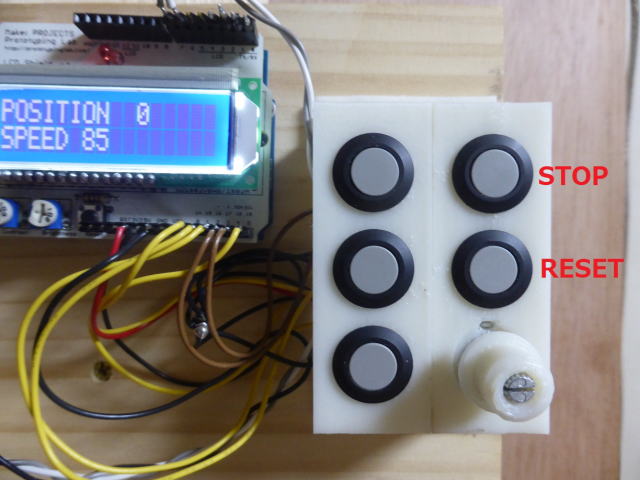 |
追加した2つのスイッチに機能を持たせました。 STOP・・・自動切断中に停止 RESET・・・丸鋸の現在位置をリセット |
| 上記の追加スイッチの動作確認です。 | |